
Page 33 - 21-工艺气体元件(特气阀)
P. 33
IP5000/5100 系列
动作原理
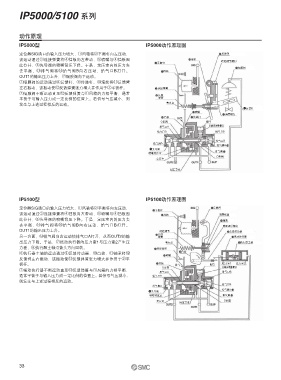
IP5000型 IP5000动作原理图
定位器SIG通口的输入压力增大,q风箱将w平衡杆向左压动, ݒઍՅ
该运动通过e连接弹簧将r挡板向左带动,t喷嘴与r挡板因 ࡐ ੵਐۙবஅۤ
ೝ࢚߇
此分开,y先导阀的喷嘴背压下降。于是,定压室内的压力失
߰ఈ݅
去平衡,!3排气阀将!4给气阀B向右压动,给气口B打开。 ޅၒ
OUT1的输出压力上升,u隔膜阀向下运动。
u隔膜阀的运动通过i反馈杆、o传递杆、!0滚轮将!1反馈臂
左右振动,该振动使!2反馈弹簧张力增大并作用于w平衡杆。 থڑࣟ
u隔膜阀不断运动直至!2反馈弹簧与q风箱的力相平衡,通常
ݒઍ
平衡于与输入压力成一定比例的位置上。若信号气压减小,则 ڑࣟ
发生与上述过程相反的运动。 ጣ૰ۅ
uݒઍ߇
ፊ
ۙଭஅۤ
ڔӱ دڿ߇
ಇഘ
Oႚං ፆڔ
ଳ௺܈ۙኝஅۤ
ಇഘ੨A
ߴഘ੨A ಇഘ੨B
ߴഘ੨B
ߴഘ݅A
ߴഘ݅B
yံڞ݅
ಇഘ݅
ፊԝუ
Oႚං
ۨუ
ࠦۨবୁ
IP5100型 IP5100动作原理图
定位器SIG通口的输入压力增大,q风箱将w平衡杆向左压动, ݒઍՅ
ೝ࢚߇
该运动通过e连接弹簧将r挡板向左带动,t喷嘴与r挡板因 ޅၒ ۙଭծಎ
此分开,y先导阀的喷嘴背压下降。于是,定压室内的压力失 ዡ
去平衡,!4排气阀将!5给气阀B向右压动,给气口B打开。 ੵਐۙবஅۤ
OUT1的输出压力上升。 ੵਐۙব ݒઍدۯഗ
ݒઍ
另一方面,!4排气阀向右运动使排气口A打开,从而OUT2的输 ڑࣟ ᄩۯኴႜഗ
出压力下降。于是,u摇动执行器的压力室1与压力室2产生压 ጣ૰ۅ ኴႜഗዷዡ
力差,i执行器主轴沿箭头方向回转。 থڑࣟ
i执行器主轴的运动通过o反馈传动器、!0凸轮、!1轴承将!2 ཫ
ፊ
反馈臂左右振动,该振动使!3反馈弹簧张力增大并作用于w平
衡杆。 ڔӱ ಇഘ ፆڔ უ૰1 უ૰2
Oႚං ଳ௺܈ۙኝஅۤ
u摇动执行器不断运动直至!3反馈弹簧与q风箱的力相平衡,
ಇഘ੨A ಇഘ੨B
通常平衡于与输入压力成一定比例的位置上。若信号气压减小, ߴഘ੨A
则发生与上述过程相反的运动。
ߴഘ੨B
ߴഘ݅A
ߴഘ݅B
yံڞ݅
ፊԝუ ಇഘ݅
ۨუ Oႚං
ࠦۨবୁ
33