
Page 14 - 21-工艺气体元件(特气阀)
P. 14
电-气定位器
智能定位器 IP8□ 系列
定位器
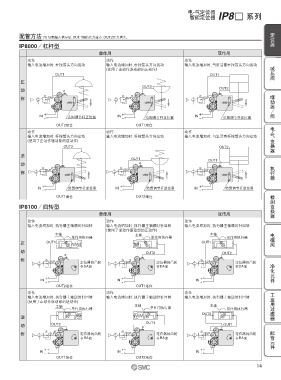
配管方法 注) 切断输入信号后, OUT.1侧的压力减小, OUT.2压力增大。
IP8000/杠杆型
单作用 双作用
单作用 双作用
动作 动作 动作
动作 动作 动作
输入电流增加时,杆按箭头方向运动 输入电流增加时,杆按箭头方向运动 输入电流增加时,气缸活塞杆按箭头方向运动
输入电流增加时,杆按箭头方向运动 输入电流增加时,杆按箭头方向运动 输入电流增加时,气缸活塞杆按箭头方向运动 减压阀
(使用了逆动作驱动部的正动作)
(使用了逆动作驱动部的正动作)
OUT1 OUT1
正 OUT1 OUT1
正
动 OUT2
动 OUT2 OUT2
× OUT2
作 × ×
作 SUP SUP × SUP 继动器/阀
SUP SUP SUP
+ + +
IN 范围调节杆正位置 IN 范围调节杆正位置 IN 范围调节杆正位置
IN - + 范围调节杆正位置 IN - + IN - +
- - 范围调节杆正位置 - 范围调节杆正位置
OUT2堵住 OUT1堵住
OUT2堵住 OUT1堵住 电
动作 动作 动作
动作 动作 动作 - 气
输入电流增加时,杆按箭头方向运动
输入电流增加时,气缸活塞杆按箭头方向运动
输入电流增加时,杆按箭头方向运动
输入电流增加时,杆按箭头方向运动 输入电流增加时,杆按箭头方向运动 输入电流增加时,气缸活塞杆按箭头方向运动 变换器
(使用了正动作驱动部的逆动作)
(使用了正动作驱动部的逆动作)
OUT2 OUT2
OUT2 OUT2
逆
逆
动 OUT1 OUT1
动 OUT1 × OUT1
×
作 × SUP SUP 执行器
作 SUP ×
SUP SUP SUP
+ + +
IN 范围调节杆逆位置 IN 范围调节杆逆位置 IN 范围调节杆逆位置
IN - + 范围调节杆逆位置 IN - + 范围调节杆逆位置 IN - + 范围调节杆逆位置
- - -
OUT1堵住 OUT2堵住 检测变换器
OUT1堵住 OUT2堵住
IP8100/回转型
单作用 双作用
单作用 双作用
动作 动作 动作
动作 动作 动作
输入电流增加时,执行器主轴顺时针回转
输入电流增加时,执行器主轴顺时针回转
输入电流增加时,执行器主轴顺时针回转
输入电流增加时,执行器主轴顺时针回转 输入电流增加时,执行器主轴顺时针回转 输入电流增加时,执行器主轴顺时针回转
(使用了逆动作驱动部的正动作) 电磁阀
主轴 (使用了逆动作驱动部的正动作) 主轴
主轴
正 主轴 单作用执行器 主轴 单作用执行器 主轴 双作用执行器
双作用执行器
单作用执行器
单作用执行器
正 OUT1 OUT1
OUT1 OUT1
动
动 OUT2 OUT2
作 × OUT2 OUT2
作 × ×
SUP 定位器的凸轮 SUP × 定位器的凸轮 SUP 定位器的凸轮 净化元件
SUP 定位器的凸轮 SUP 定位器的凸轮 SUP 定位器的凸轮
在DA面
在DA面
在DA面
在DA面 在DA面 在DA面
+ + +
IN IN IN
IN - + IN - + IN - +
- OUT2堵住 - OUT1堵住 -
OUT2堵住 OUT1堵住
动作 动作 动作 工业用过滤器
动作 动作 动作
输入电流增加时,执行器主轴逆时针回转 输入电流增加时,执行器主轴逆时针回转 输入电流增加时,执行器主轴逆时针回转
输入电流增加时,执行器主轴逆时针回转 输入电流增加时,执行器主轴逆时针回转 输入电流增加时,执行器主轴逆时针回转
(使用了正动作驱动部的逆动作)
(使用了正动作驱动部的逆动作)
主轴 主轴 单作用执行器 主轴
主轴 单作用执行器 主轴 单作用执行器 主轴 双作用执行器
逆 单作用执行器 OUT2 双作用执行器
逆 OUT2
动 OUT1
动 OUT2 OUT1
OUT2 × OUT1 OUT1
作 × 配管元件
作 SUP × × 定位器的凸轮 SUP 定位器的凸轮 SUP 定位器的凸轮
SUP 定位器的凸轮 SUP 定位器的凸轮 SUP 定位器的凸轮
在RA面
在RA面
在RA面
在RA面 在RA面 在RA面
+ + +
IN IN IN
IN - + IN - + IN - +
- OUT1堵住 - OUT2堵住 -
OUT1堵住 OUT2堵住
14